СТРОЕНИЕ МЕХАНИЗМОВ
Основные понятия и определения.
Система терминов обеспечивает единообразный подход к описанию любой системы знаний. Поэтому начнем с уточнения смысла и значения используемых формулировок.
Механизм - система тел, предназначенных для преобразования движения одного или нескольких твердых тел и (или) сил, действующих на них, в требуемые движения других тел и (или) сил. В теории механизмов и машин под твердыми телами понимают как абсолютно твердые, так и деформируемые тела.
Машина – устройство, выполняющее механические движения для преобразования энергии, материалов и информации. Под материалами подразумевают объекты труда: обрабатываемые изделия, перемещаемые грузы и др.
Деталь – изделие, изготовленное из единообразного, по наименованию и марки материала, без применения сборочных операций.
Звено – твердое тело, участвующее в заданном преобразовании движения. Звено может состоять из нескольких деталей, не имеющих между собой относительного движения.
Стойка - звено, принимаемое условно за неподвижное.
Входное звено - звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев.
Выходное звено - звено, совершающее движение, для выполнения которого предназначен механизм.
Начальное звено – звено, которому приписывается одна или несколько обобщенных координат механизма.
Обобщенная координата механизма - каждая из независимых между собой координат, определяющих положение всех звеньев механизма относительно стойки.
Число степеней свободы механизма –число обобщенных координат механизма.
Связь – любое условие, которое уменьшает число степеней свободы механизма. Любую связь можно отбросить, заменив ее действие реакцией.
Избыточная связь – связь, устранение которой не изменяет число степеней свободы механизма.
Кинематическая пара – соединение двух твердых тел механизма, допускающее их заданное относительное движение. Условием существования пары является: наличие двух звеньев, их контакт и относительное движение звеньев.
Кинематическая цепь – система звеньев и (или) твердотельных элементов механизма, образующих между собой кинематические пары. Различают кинематические цепи незамкнутые и замкнутые . Незамкнутой называется такая кинематическая цепь, у которой имеется хотя бы одно звено, входящее только в одну кинематическую пару. У замкнутой цепи нет звеньев, имеющих свободные элементы кинематических пар. Каждое звено такой цепи входит хотя бы в две пары.
Элемент механизма – твердотельный, жидкостный или газовый компонент механизма, обеспечивающий взаимодействие его звеньев, не контактирующих непосредственно друг с другом.
Элемент сопряжения кинематической пары – общая поверхность, линия или точка, образуемая сопрягаемыми элементами двух других тел.
Число степеней свободы (подвижность) кинематической пары (Н) – число независимых координат, необходимых для описания относительного положения звеньев кинематических пар.
Известно, что свободно движущееся тело в пространстве обладает шестью степенями свободы. Число условий связи S , наложенных на относительное движение звена кинематической пары может изменяться в пределах . Различают одно-, двух-, трех, четырех- и пяти-подвижные кинематические пары. Следовательно, имеет место соотношение H = 6 – S.
Одноподвижная пара – кинематическая пара с одной степенью свободы в относительном движении соединяемых твердых тел.
Двухподвижная пара – кинематическая пара с двумя степенями свободы в относительном движении соединяемых твердых тел.
Трехподвижная пара – кинематическая пара с тремя степенями свободы в относительном движении соединяемых твердых тел.
Четырехподвижная пара – кинематическая пара с четырьмя степенями свободы в относительном движении соединяемых твердых тел.
Пятиподвижная пара – кинематическая пара с пятью степенями свободы в относительном движении соединяемых твердых тел.
Структурная формула – алгебраическое выражение, устанавливающее связь между числом степеней свободы механизма, числом подвижных звеньев, числом и подвижностью кинематических пар.
Группа Ассура – кинематическая цепь, присоединение которой к механизму или ее отсоединение образует механизм, имеющий подвижность, равную подвижности исходного механизма, не разделяемая на другие цепи с теми же свойствами.
Масштабный коэффициент – отношение численного значения физической величины в свойственных ей единицах к длине отрезка (мм), изображающего эту величину (на схеме, графике и т.п.).
Масштаб – величина, обратная масштабному коэффициенту.
Классификация кинематических пар
1. В зависимости от числа Н различают одно-, двух-, трех-, четырех-, и пятиподвижные кинематические пары. Число уравнений связей принимают за номер класса.
2. По характеру соприкосновения элементов звеньев (точнее виду элементов) пары делят на низшие и высшие (предложение Ф. Рело). К низшим относят кинематические пары, элементами которых являются поверхности (рис 1.2). Элементами высших пар являются линии или точки (рис 1.2).
3. По характеру сопряжения различают кинематические пары с силовым замыканием (соприкосновение звеньев обеспечивается действием какой - либо силы, например, веса или пружины) и кинематическим (постоянный контакт звеньев достигается за счет конструктивной формы элементов).
4. В зависимости от характера относительного движения звеньев кинематические пары подразделяют на поступательные, вращательные, винтовые, цилиндрические, сферические, плоскостные.
На рис. 1.1 изображены одноподвижные пары (кинематические пары V класса) рассмотрим их подробнее.
|
|||||
|
|||||
|
|||||



|
Пара одноподвижная :
1) Вращательная (рис. 1.1. а) – цилиндрический шарнир. Наложено пять условий связи: исключены все движения, кроме вращательного.
2) Поступательная (рис. 1.1. б) – наложено пять условий связи: исключены все движения, кроме одного поступательного.
3) Винтовая (рис. 1.1. в) – наложено пять условии связи: исключены все движения, кроме поступательного. (Вращение не вносит степени свободы, т.к. в данном случае поступательное и вращательное движения не независимы).
На рис. 1.2 изображены пары двух-, трех-, четырех-, и пятиподвижные (кинематические пары IV, III, II и I классов) рассмотрим их подробнее.
|
|
|
||||||
|
||||||||




|
Пара двуподвижная (рис. 1.2.а) - втулка на валике. Наложено четыре условия связи, исключены поступательные и вращательные движения вдоль осей О Х и О Z .
Пара трехподвижная (рис. 1.2.б) - шаровой цилиндр. Наложено три условия связи: исключены поступательные движения вдоль всех трёх осей.
Пара четырехподвижная (рис. 1.2.в)- цилиндр на плоскости. Наложено два условия связи: исключено поступательное движение вдоль оси O Z и вращательное вокруг оси O X .
Пара пятиподвижная (рис. 1.2.г) - шар на плоскости. Наложено одно условие связи: исключено поступательное движение вдоль оси O Z .
Один на один с врагом [Русская школа рукопашного боя] Кадочников Алексей Алексеевич
Кинематические пары в теле человека
Кинематические пары, применяемые в технике и распространенные в природе, имеют принципиально важное отличие.
В технических механизмах кинематические пары устроены обычно так, что возможны их лишь вполне определенные, заранее заданные плоские движения.
Кинематические пары в теле человека – это подвижные соединения двух костных звеньев, обеспечивающие их произвольные пространственные движения. Возможности движения кинематических соединений определяются скелетным строением тела и управляющим воздействием мышц.
Кинематические пары в теле человека принято называть биокинематическими. Из всех биокинематических пар при изучении двигательных действий человека специалистов интересуют прежде всего верхние и нижние конечности тела, представляющие собой – по принятой классификации – низшие вращательные кинематические пары.
Рис. 17
На рис. 17 показана кинематическая модель верхней конечности человека. Шаровым шарниром 1 биокинематическая пара связана с туловищем; между собой звенья пары соединены цилиндрическим шарниром 2. Пространственные биокинематические пары конечностей могут быть замкнутыми или разомкнутыми. Они имеют постоянные и временные связи, которые и определяют, сколько и каких степеней свободы имеет данная рассматриваемая пара. Так, движения руки как разомкнутой биокинематической пары (рис. 18а) ограничены плечевым сочленением, исключающим линейные перемещения плеча 1 относительно туловища.
Ориентация руки в любой момент ее пространственного движения относительно туловища может быть описана пятью параметрами. Координаты x A , y A , z A (рис. 18б) определяют положение плеча 1, положение предплечья 2 относительно плеча задается углом? 2 , поворот предплечья вокруг собственной оси – углом? 2 .
Поворот предплечья на угол? 2 можно не учитывать, т. к. он не влияет на ориентацию руки в целом. При принятом допущении очевидно, что рука человека в общем случае имеет четыре степени свободы.
Фактическое же число степеней свободы руки зависит от ее ориентации в пространстве и ограничено пределами подвижности плечевого и локтевого суставов.

Рис. 18
Данный текст является ознакомительным фрагментом. Из книги Мужчина и женщина: искусство любви автора Еникеева Диля Из книги Один на один с врагом [Русская школа рукопашного боя] автора Кадочников Алексей АлексеевичКинематические пары Искусственно созданную механическую систему тел, предназначенную для преобразования движения, называют механизмом. Главной особенностью всякого механизма является определенность движения его частей. Для того чтобы любое тело двигалось
Из книги Значительное увеличение объема рук за шесть недель автора Дарден ЭПлоские кинематические пары Плоской называется кинематическая пара, все точки звеньев которой в относительном движении перемещаются в одной или в параллельных плоскостях.Плоские кинематические пары получили наибольшее распространение в технике; они проще, потому
Из книги Китайское искусство владения мечом. Руководство по тай-цзи цзянь автора Юнь ЧжанПространственные кинематические пары Кинематическая пара на каждой из координатных осей называется пространственной, если все точки ее звеньев в относительном движении описывают пространственные кривые.В любой момент пространственного движения положение отдельного
Из книги Красной карточкой по мягкому месту автора Эпштейн АрнольдКинематика движений человека В биомеханике под кинематикой движений понимают «геометрию», то есть пространственную форму движений человека без учета его массы и действующих сил. Кинематика дает в целом только внешнюю картину движений. Причины возникновения и
Из книги Учебник подводной охоты на задержке дыхания автора Барди МаркоУровень человека Другая черта, понравившаяся мне в Эде Робинсоне, проявилась сразу после нашей встречи. Мы сидели в кабинете спортзала, и я рассказывал о некоторых измерениях и фотографиях, которые я надеялся сделать в этот день. Например, я хотел тщательно измерить,
Из книги Теория и методика подтягиваний (части 1-3) автора Кожуркин А. Н. Из книги Успех или Позитивный образ мышления автора Богачев Филипп Олегович6. ВО ИМЯ ЧЕЛОВЕКА, НА БЛАГО ЧЕЛОВЕКА «И я знаю этого человека!» - хочется порой под стать герою одного из северных анекдотов воскликнуть во время иных матчей, когда болельщиков можно пересчитать по пальиам.На самом же деле нас, конечно, больше. Во много раз больше. Ведь не
Из книги Как победить любого противника в экстренных ситуациях. Секреты спецназа автора Кашин Сергей ПавловичВодное естество человека Одно из главных качеств, характеризующих хорошего ныряльщика на - это уровень его адаптации к водной среде, по сути, уровень «слияния» подводника с водой.В особенности, если речь идет об охотнике на задержке дыхания. Чем больше он сливается с
Из книги Равновесие в движении. Посадка всадника автора Дитце Сюзанна фон1.2.1 Кинематические характеристики подтягивания. 1.2.1.1 Пространственные характеристики. Нередко из-за неудачно выбранного исходного положения спортсмен на соревнованиях не может показать результат, который без труда демонстрирует на тренировках. Ненадёжный хват,
Из книги Ешь и молодей. Секреты правильного питания автора Ланц Карл Из книги автораРасположение уязвимых точек на теле человека К зонам, где находятся уязвимые точки корпуса, относятся промежность, солнечное сплетение, ребра, сердце, печень, селезенка, подмышки, почки, копчик.Через область промежности проходит много крупных сосудов и нервов, выше
Из книги автора3.3. Нахождение важнейших точек ориентации на собственном теле Одни лишь теоретические знания анатомии едва ли помогут вам научиться ездить верхом. Чтобы оживить эту очень важную главу об анатомии, я рекомендовала бы вам сейчас надеть короткие тренировочные шорты,
Из книги автора5.3. Определение важнейших точек ориентации на теле Вот и снова перед вами возникает вопрос, насколько хорошо вы знаете собственное тело. Прежде чем начать поиски важнейших точек, изучите себя перед зеркалом и ответьте себе:* Каковы контуры вашего плечевого пояса, он
Из книги автора6.3. Определение важнейших точек ориентации на собственном теле Важной точкой ориентации является верхняя передняя ость таза (рис. 6.8), вы уже находили ее, изучая главу о тазе. Она расположена на уровне тазобедренного сустава и поэтому очень важна для наблюдений за
Из книги автораГлава третья. В здоровом теле – здоровый дух! 3.1. Стройная фигура на долгие годы Многокомпонентные блюда сложны в приготовлении, их калорийность возрастает в разы за счет содержания разных продуктов с порой несочетаемыми белками и углеводами. Даже, казалось бы,
Физические величины и единицы измерений,
Используемые в механике
| Физическая величина | Единица измерений | ||
| Наименование | Обозначение | Наименование | Обозначение |
| Длина Масса Время Угол плоский Перемещение точки Скорость линейная Скорость угловая Ускорение линейное Ускорение угловое Частота вращения Плотность материала Момент инерции Сила Момент силы Вращающий момент Работа Кинетическая энергия Мощность | L, l, r m T, t a, b, g, d S u w a e n r J F, P, Q, G M T A E N | Метр Килограмм Секунда Радиан, градус Метр Метр в секунду Радиан в секунду Метр на секунду в квадрате Радиан на секунду в квадрате Оборот в минуту Килограмм на кубический метр Килограмм-метр в квадрате Ньютон Ньютон-метр Ньютон-метр Джоуль Джоуль Ватт | м кг с рад, α 0 м м/с рад/с, 1/c м/с 2 рад/c 2 , 1/c 2 об/мин кг/м 3 кг. м 2 Н (кг. м/с 2) Нм Нм Дж = Нм Дж Вт (Дж/с) |
СТРУКТУРА И КЛАССИФИКАЦИЯ МЕХАНИЗМОВ
Структура механизмов
В состав механизмов входят твёрдые тела , которые называют звеньями . Звенья могут быть и не твёрдыми (например, ремень). Жидкости и газы в гидро- и пневмомеханизмах звеньями не считаются.
Условное изображение звеньев на кинематических схемах механизмов регламентируется ГОСТом. Примеры изображения некоторых звеньев приведены на рис. 1.1.
Рис. 1.1. Примеры изображения звеньев
на кинематических схемах механизмов
Звенья бывают :
– входные (ведущие) – отличительным признаком их является то, что элементарная работа приложенных к ним сил положительна (работа силы считается положительной, если направление действия силы совпадает с направлением движения точки её приложения или под острым углом к ней);
– выходные (ведомые) – элементарная работа приложенных к ним сил является отрицательной (работа силы считается отрицательной, если направление действия силы противоположно направлению движения точки её приложения);
– подвижные ;
– неподвижные (станина, стойка).
На кинематических схемах звенья обозначаются арабскими цифрами:0, 1, 2 и т.д. (см. рис. 1.1).
Подвижное соединение двух соприкасающихся звеньев называется кинематической парой . Она допускает возможность движения одного звена относительно другого.
Классификация кинематических пар
1. По элементам соединения звеньев кинематические пары делятся:
– на высшие (они имеются, например, в зубчатых и кулачковых механизмах) – соединение звеньев друг с другом происходит по линии или в точке:

– низшие – соединение звеньев друг с другом происходит по поверхности. В свою очередь низшие соединения делятся:

на вращательные
поступательные
цилиндрические
|
сферические
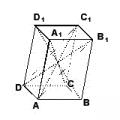
2. По количеству наложенных связей . Тело, находясь в пространстве (в декартовой системе координат X, Y, Z ) имеет 6 степеней свободы. Оно может перемещаться вдоль каждой из трёх осей X, Y и Z , а также вращаться вокруг каждой оси (рис. 1.2). Если тело (звено) образует с другим телом (звеном) кинематическую пару, то оно теряет одну или несколько из этих 6 степеней свободы.

По количеству утраченных телом (звеном) степеней свободы кинематические пары делят на 5 классов. Например, если телами (звеньями), образовавшими кинематическую пару, утрачено по 5 степеней свободы каждым, эту пару называют кинематической парой 5-го класса. Если утрачено 4 степени свободы – 4-го класса и т.д. Примеры кинематических пар различных классов приведены на рис. 1.2.
 Рис. 1.2. Примеры кинематических пар различных классов
Рис. 1.2. Примеры кинематических пар различных классов
По структурно-конструктивному признаку кинематические пары можно разделить на вращательные, поступательные, сферические, цилиндрические и др.
Кинематическая цепь
Несколько звеньев, соединённых между собой кинематическими парами, образуют кинематическую цепь .
Кинематические цепи бывают:

замкнутые
разомкнутые
Чтобы из кинематической цепи получить механизм , необходимо:
– одно звено сделать неподвижным, т.е. образовать станину (стойку);
– одному или нескольким звеньям задать закон движения (сделать ведущими) таким образом, чтобы все остальные звенья совершали требуемые целесообразные движения.
Число степеней свободы механизма – это число степеней свободы всей кинематической цепи относительно неподвижного звена (стойки).
Для пространственной кинематической цепи в общем виде условно обозначим:
количество подвижных звеньев – n ,
количество степеней свободы всех этих звеньев – 6n ,
количество кинематических пар 5-го класса – P 5 ,
количество связей, наложенных кинематическими парами 5-го класса на звенья, входящие в них, – 5Р 5 ,
количество кинематических пар 4-го класса – Р 4 ,
количество связей наложенных кинематическими парами 4-го класса на звенья, входящие в них, – 4Р 4 и т.д.
Для плоской кинематической цепи и соответственно для плоского механизмаЭту формулу называют формулой П.Л. Чебышева (1869). Она может быть получена из формулы Малышева при условии, что на плоскости тело обладает не шестью, а тремя степенями свободы:
W = (6 – 3)n – (5 – 3)P 5 – (4 – 3) P 4 .
Величина W показывает, сколько должно быть у механизма ведущих звеньев (если W = 1 – одно, W = 2 – два ведущих звена и т.д.).
Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой. На схемах кинематические пары обозначают прописными буквами латинского алфавита.
Совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементами кинематической пары.
Кинематические пары (КП) классифицируются по следующим признакам:
1. По виду места контакта (места связи) поверхностей звеньев:
– низшие, в которых контакт звеньев осуществляется по плоскости или поверхности конечных размеров (пары скольжения);
– высшие, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение с перекатыванием).
Из числа плоских к низшим кинематическим парам относятся поступательная и вращательная. (Низшие кинематические пары позволяют передавать большие усилия, более технологичны и менее изнашиваются, чем высшие кинематические пары).
2. По относительному движению звеньев, образующих пару:
– вращательные;
– поступательные;
– винтовые;
– плоские;
– пространственные;
– сферические.
3. По способу замыкания (обеспечения контакта звеньев пары):
– силовое (Рис.2) (за счет действия сил веса или силы упругости пружины);
– геометрическое (Рис.3.) (за счет конструкции рабочих поверхностей пары).

На рис. 3. видно, что во вращательной и поступательной кинематических парах замыкание соединенных звеньев осуществляется геометрически. В кинематических парах «цилиндр-плоскость» и «шар-плоскость» (см. табл. 2) силовым способом, т.е. за счет собственной массы цилиндра и шара или другими конструктивными решениями (например, в сферическом шарнире шар может прижиматься к охватывающей поверхности за счет сил упругости дополнительно вводимой в конструкцию шаровой опоры автомобиля пружины). Элементы геометрически замкнутой пары не могут отделяться друг от друга из-за конструктивных особенностей.
4. По числу условий связи, накладываемых на относительное движение звеньев (число условий связи определяет класс кинематической пары );
В зависимости от способа соединения звеньев в кинематическую пару число условий связи может измениться от одного до пяти. Поэтому все кинематические пары можно разделить на пять классов.
5. По числу подвижностей в относительном движении звеньев (число степеней подвижности определяет род кинематической пары);
Кинематические пары обозначаются P i , где i =1 - 5 – класс кинематической пары. (Кинематическая пара пятого класса является парой первого рода).
Классификация КП по числу подвижностей и по числу связей приведена в таблице 2.
В таблице представлены некоторые виды кинематических пар всех пяти классов. Стрелками обозначены возможные относительные движения звеньев. По виду реализуемых в кинематических парах простейших независимых движений вводят обозначения (цилиндрическая пара обозначается ПВ , сферическая – ВВВ и т.д., где П – поступательное , В – вращательное движение ).
Подвижность кинематической пары – число степеней свободы в относительном движении ее звеньев. Различают одно-, двух-, трех-, четырех- и пятидвижные кинематические пары.
Таблица 2. Классификация кинематических пар

Одноподвижной (парой V класса) называется кинематическая пара с одной степенью свободы в относительном движении её звеньев и пятью наложенными условиями связи. Одноподвижная пара может быть вращательной, поступательной или винтовой.
Вращательная пара допускает одно вращательное относительное движение её звеньев вокруг оси X. Соприкосновение элементов звеньев вращательных пар происходит по боковой поверхности круглых цилиндров. Следовательно, эти пары относятся к низшим.
Поступательной парой называется одноподвижная пара, допускающая прямолинейно-поступательное относительное движение её звеньев. Поступательные пары также являются низшими, так как соприкосновение элементов их звеньев происходит по поверхностям.
Винтовой парой называется одноподвижная пара, допускающая винтовое (с постоянным шагом) относительное движение её звеньев и принадлежащая к числу низших пар.
При образовании кинематической пары можно подобрать так форму элементов кинематических пар, что при одном независимом простейшем перемещении возникает другое производное движение, как например, в винтовой паре. Такие кинематические пары называются траекторными .
Двухподвижная кинематическая пара (пара IV класса) характеризуется двумя степенями свободы в относительном движении её звеньев и четырьмя условиями связи. Такие пары могут быть либо с одним вращательным и одним поступательным относительными движениями звеньев, либо с двумя вращательными движениями.
К первому виду принадлежит так называемая цилиндрическая пара, т.е. низшая кинематическая пара, допускающая независимые вращательное и колебательное (вдоль оси вращения) относительные движения её звеньев.
Примером пары второго вида является сферическая пара с пальцем. Эта низшая геометрически замкнутая пара, допускающая относительное вращение своих звеньев вокруг осей X и У.
Трехподвижной парой называется кинематическая пара с тремя степенями свободы в относительном движении её звеньев, что свидетельствует о наличии трёх наложенных условий связи. В зависимости от характера относительного движения звеньев различают три вида пар: с тремя вращательными движениями; с двумя вращательными и одним поступательным движениями; с одним вращательным и двумя поступательными.
Основным представителем первого вида является сферическая пара. Это низшая геометрически замкнутая пара, допускающая сферическое относительное движение её звеньев.
К третьему виду принадлежит так называемая плоскостная пара , т.е. низшая кинематическая пара, допускающая плоскопараллельное относительное движение её звеньев.
Четырехподвижная пара (пара II класса) - это кинематическая пара с четырьмя степенями свободы в относительном движении её звеньев, т.е. с двумя наложенными условиями связи. Все четырёхподвижные пары являются высшими. Примером может служить пара, допускающая два вращательных и два поступательных движения.
Пятиподвижной парой (пара I класса) называется кинематическая пара с пятью степенями свободы в относительном движении её звеньев, т.е. с одним наложенным условием связи. Такая пара, составленная из двух сфер, разрешает три вращательных и два поступательных движения и всегда будет высшей.
Кинематическое соединение – кинематическая пара с числом звеньев более двух.
Основные понятия и определения в теории механизмов
Теория механизмов и машин изучает строение, кинематику и динамику механизмов и машин.
Механизмом называется искусственно созданная система тел, предназначенная для преобразования движения одногоили нескольких тел в требуемые движения других тел.
Твердые тела, входящие в состав механизма, называются звеньями.
Каждая подвижная деталь или группа деталей, образующая одну жесткую подвижную систему тел, называется подвижным звеном механизма .
Все неподвижные детали образуют одну жесткую неподвижную систему тел, называемую неподвижным звеном или стойкой.
Следовательно, любой механизм имеет одно неподвижное и одно или несколько подвижных звеньев.
Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой.
Поверхности, линии, точки звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называются элементами звена.
Связанная система звеньев, образующих между собой кинематические пары, называется кинематической цепью.
Механизм – есть кинематическая цепь, используемая для осуществления требуемого движения.
Механизмы, входящие в состав машины, разнообразны. С точки зрения их функционального назначения механизмы машины делятся на следующие виды:
а) механизмы двигателей и преобразователей :
механизмы двигателей осуществляют преобразование различных видов энергии в механическую работу;
механизмы преобразователей осуществляют преобразование механической работы в другие виды энергии;
б) передаточные механизмы, осуществляющие передачу движения от двигателя к технологической машине или исполнительному органу;
в) исполнительные механизмы , непосредственно воздействующие на обрабатываемую среду или объект;
г) механизмы управления , контроля и регулирования, осуществляющие управление технологическим процессом, контроль и т.п.;
д) механизмы автоматического счета , взвешивания и упаковки, применяемые в машинах, выпускающих массовую штучную продукцию.
Кинематические пары и их классификация
Главным свойством пары является число геометрических параметров, с помощью которых можно определить относительное положение связанных звеньев. Например, при соприкосновении по поверхности вращения относительное положение звеньев вполне определяется заданием лишь одного параметра – угла относительного поворота звеньев в плоскости, перпендикулярной оси вращения.
При соприкосновении по сферической поверхности таких параметров уже три – это углы поворота вокруг трех взаимно перпендикулярных осей, пересекающихся в центре сферы.
Следовательно, элементы кинематической пары накладывают на относительное движение звеньев некоторые ограничения, связывая между собой определенным образом координаты точек обоих звеньев.
Ограничения, накладываемые элементами кинематической пары на относительное движение звеньев, образующих пару, называют связями, а управления, выражающие эти ограничения – уравнениями связи.
Рассмотрим, какие связи и в каком количестве могут быть наложены на относительное движение звеньев кинематической пары.
Как известно, в общем случае всякое свободно движущееся в пространстве абсолютно твердое тело обладает шестью степенями свободы:
тремя вращениями вокруг осей X, Y, Z и тремя поступательными движениями вдоль тех же осей.
Связи, наложенные на относительное движение звена кинематической пары, ограничивают те же возможные относительные движения, которыми обладают звенья в свободном состоянии.
В результате этих ограничений некоторые из шести возможных относительных движений свободно движущегося звена становятся для него связанными. Оставшиеся независимыми возможные движения определяют число степеней свободы звеньев кинематической пары в их относительном движении.
Кинематические пары в зависимости от числа условий связи, налагаемых на относительное движение ее звеньев, разделены на пять классов:
Пара I класса – (рис.1 а) пятиподвижная пара, имеет число степеней свободы звеньев, равное пяти и число условий связи, равное 1;
Пара II класса – (рис.1 б) четырехподвижная пара, число степеней свободы звена кинематической пары равно четырем, число условий связи равно 2;
Пара III класса – (рис.1 в, и, г)трехподвижная пара, число степеней свободы звена кинематической пары равно трем, число условий связи – 3;
Пара IV класса – (рис.1 д, и, е)двухподвижная пара, число степеней свободы звена равно 2, число условий связи – 4;
Пара V класса – (рис.1 ж, з. и)одноподвижная (вращательная пара), число степеней свободы звена равняется единице, число условий связи равно 5.
Кинематические пары делятся на пространственные и плоские. Пространственными кинематическими парами называется пара, точки звеньев которых в относительном движении описывают пространственные кривые. Плоскими кинематическими парами называются такие пары, точки звеньев которых в относительном движении перемещаются в параллельных плоскостях, т.е. их траектории являются плоскими кривыми. В современном машиностроении особенно широкое применение получили плоские механизмы, звенья которых входят в пары IV и V классов.
Кинематические пары различаются также по характеру соприкосновения звеньев. Если элементы кинематической пары таковы, что при каждом относительном положении звеньев они имеют соприкосновение по поверхности, то пару называют низшей. Если же касание происходит в отдельных точках или по линиям, то пару называют высшей.
При относительном движении звеньев, образующих низшую пару, поверхности их соприкосновения скользят друг по другу. Если же звенья образуют высшую пару, то их относительное движение может происходить как при скольжении элементов пары, так и без него – перекатыванием.